¿QUÉ ES UN IMU MPU-6050?
El MPU-6050 es una unidad de medición inercial (IMU) de seis grados de libertad (6DOF) fabricado por Invensense, que combina un acelerómetro de 3 ejes y un giroscopio de 3 ejes. La comunicación puede realizarse tanto por SPI como por bus I2C, por lo que es sencillo obtener los datos medidos. La tensión de alimentación es de bajo voltaje entre 2.4 a 3.6V.Esta entrada esta basada en la siguiente fuente a la que agradezco todo el esfuerzo de su trabajo.
Fuentes: https://www.luisllamas.es/arduino-orientacion-imu-mpu-6050/
Frecuentemente se encuentran integrados en módulos como el GY-521 que incorporan la electrónica necesaria para conectarla de forma sencilla a un Arduino. En la mayoría de los módulos, esto incluye un regulador de voltaje que permite alimentar directamente a 5V. Dispone de conversores analógicos digitales (ADC) de 16bits. El rango del acelerómetro puede ser ajustado a ±2g, ±4g, ±8g, y ±16g, el del giroscopio a ±250, ±500, ±1000, and ±2000°/sec.
Es un sensor consume 3.5mA, con todos los sensores y el DMP activados. Dispone de un sensor de temperatura embebido, un reloj de alta precisión e interrupciones programables. También puede conectarse a otros dispositivos I2C como master.
El MPU-6050 incorpora un procesador interno (DMP Digital Motion Processor) que ejecuta complejos algortimos de MotionFusion para combinar las mediciones de los sensores internos, evitando tener que realizar los filtros de forma exterior.
El MPU-6050 es uno de los IMUs más empleados por su gran calidad y precio. Será uno de los componentes que con mayor frecuencia incorporaremos a nuestros proyectos de electrónica y robótica.
Es un sensor consume 3.5mA, con todos los sensores y el DMP activados. Dispone de un sensor de temperatura embebido, un reloj de alta precisión e interrupciones programables. También puede conectarse a otros dispositivos I2C como master.
El MPU-6050 incorpora un procesador interno (DMP Digital Motion Processor) que ejecuta complejos algortimos de MotionFusion para combinar las mediciones de los sensores internos, evitando tener que realizar los filtros de forma exterior.
El MPU-6050 es uno de los IMUs más empleados por su gran calidad y precio. Será uno de los componentes que con mayor frecuencia incorporaremos a nuestros proyectos de electrónica y robótica.
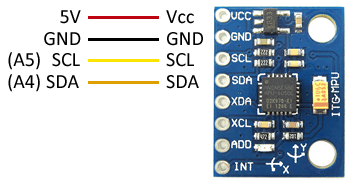
ESQUEMA MONTAJE
La conexión es sencilla, simplemente alimentamos el módulo desde Arduino mediante GND y 5V y conectamos el pin SDA y SCL de Arduino con los pines correspondientes del sensor.
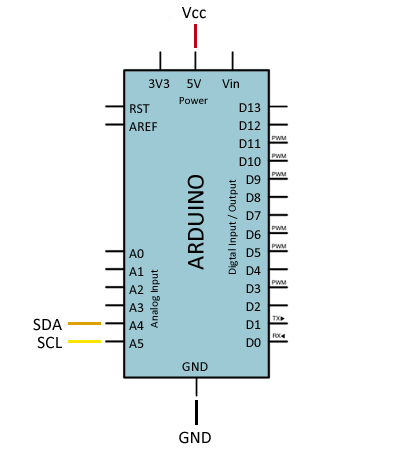
Mientras que la conexión vista desde el lado de Arduino quedaría así.
EJEMPLOS DE CÓDIGO
Para realizar la lectura del MPU-6050 usaremos la librería desarrollada por Jeff Rowberg disponible en este enlace. También emplearemos la librería I2Cdev desarrollada por el mismo autor, que mejora la comunicación I2C.
La librería proporciona ejemplos de código, que resulta aconsejable revisar. Los siguientes ejemplos son modificaciones a partir de los disponibles en la librería.
LEER VALORES RAW
En el primer ejemplo, aprendemos a leer los valores directamente proporcionados por el MPU-6050 (valores RAW) a través del bus I2C. Los valores RAW tienen un rango de medición entre -32768 y +32767.
//GND - GND
//VCC - VCC
//SDA - Pin A4
//SCL - Pin A5
#include "I2Cdev.h"
#include "MPU6050.h"
#include "Wire.h"
const int mpuAddress = 0x68; //Puede ser 0x68 o 0x69
MPU6050 mpu(mpuAddress);
int ax, ay, az;
int gx, gy, gz;
void printTab()
{
Serial.print(F("\t"));
}
void printRAW()
{
Serial.print(F("a[x y z] g[x y z]:t"));
Serial.print(ax); printTab();
Serial.print(ay); printTab();
Serial.print(az); printTab();
Serial.print(gx); printTab();
Serial.print(gy); printTab();
Serial.println(gz);
}
void setup()
{
Serial.begin(9600);
Wire.begin();
mpu.initialize();
Serial.println(mpu.testConnection() ? F("IMU iniciado correctamente") :
F("Error al iniciar IMU"));
}
void loop()
{
// Leer las aceleraciones y velocidades angulares
mpu.getAcceleration(&ax, &ay, &az);
mpu.getRotation(&gx, &gy, &gz);
printRAW();
delay(100);
}

